蜘蛛手式和離心式理環壓環機的區別和應用
作者:admin
更新時間:2025-03-15
點擊數:
在現代包裝工業中,理環壓環機作為提環自動化安裝的重要設備,已成為飲料、日化、醫藥等行業高效生產的標配。針對不同產品需求,市場上主流的設備類型分為蜘蛛手式與離心式。本文將深度解析兩者的技術差異、性能優勢及適用場景,助您精準匹配生產需求。

蜘蛛手理環壓環機

離心式理環壓環機
一、結構與工作原理對比
1.蜘蛛手式理環壓環機
核心結構:采用多關節機械臂(形似“蜘蛛手”),配備高精度伺服電機與視覺定位系統。
工作原理:
振動盤或輸送帶將提環整理至預定位置;
機械臂通過柔性軌跡抓取提環,結合視覺檢測與容器實時定位;
多角度調整后,精準按壓至容器指定安裝點(如瓶口、罐身凹槽)。
2.離心式理環壓環機
核心結構:由高速旋轉離心盤、固定軌道及氣動壓裝模塊組成。
工作原理:
提環投入離心盤后,隨旋轉產生的離心力被甩入外圈軌道;
軌道導向裝置將提環推送至壓裝工位;
氣動機構快速完成壓裝,全程依賴機械力學控制。
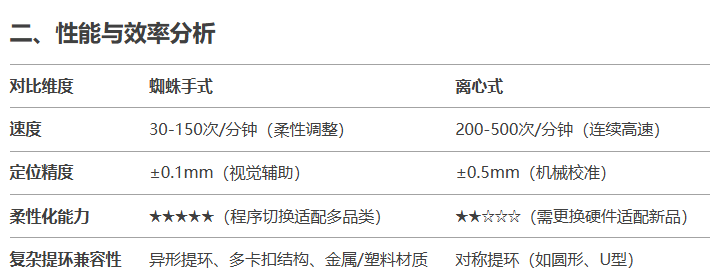
二、性能與效率分析
三、適用場景與行業案例
1.蜘蛛手式:高精度與多場景適配
需要高精度、多品種兼容性或復雜提環安裝的場景。
預算充足,對設備柔性化要求高。
2.離心式:規模化生產的效率引擎
追求極致效率、產品單一且提環結構簡單的場景。
成本敏感,需快速回本的規模化生產。
若有具體需求(如提環形狀、生產節拍),可進一步細化分析!